仠僼僅僩乮岝妛揑乯僄儞僐乕僟乕
僷僜僐儞儅僂僗偺側偐偵偼丄俀慻乮廲堏摦偲墶堏摦検専弌梡乯偺岝妛僄儞僐乕僟偑擖偭偰偄傑偡丅
愒奜慄LED 偲 2懳偺僼僅僩僩儔儞僕僗僞乕丄廃埻偵栺50屄偺寠偺偁偄偨崟偄墌斦乮冇16mm)丄偦偺幉庴僴僂僕儞僌傛傝峔惉偝傟偰偄傑偡丅
仠僼僅僩僄儞僐乕僟乕傪庢傝奜偡
僷僜僐儞儅僂僗婎斅偼丄儀乕僋斅偺偨傔昁梫側晹暘偩偗傪丄偼偝傒偱愗傝弌偦偆偲偡傞偲妱傟偰偟傑偄傑偡丅俴俤俢偲僼僅僩俿俼偼丄敿揷偺擬偱夡偝側偄傛偆丄偝偭偲奜偟偰僈儔僗僄億婎斅乮偱偒傟偽0.8mm埵偺敄栚乯偵悺朄傪拤幚偵嵞尰偟傑偡丅崟偄墌斦傕僾儔僗僠僢僋偱丄擬偵庛偄偺偱拲堄偟傑偡丅崟偄幉庴僴僂僕儞僌傕嵞巊梡偟傑偡丅僴僂僕儞僌偺揤堜晹暘傪愗傝庢傞偲丄墌斦偑弌傑偡偺偱丄巜偺暯偱夞偣傞峔憿偵側傝傑偡丅
丂
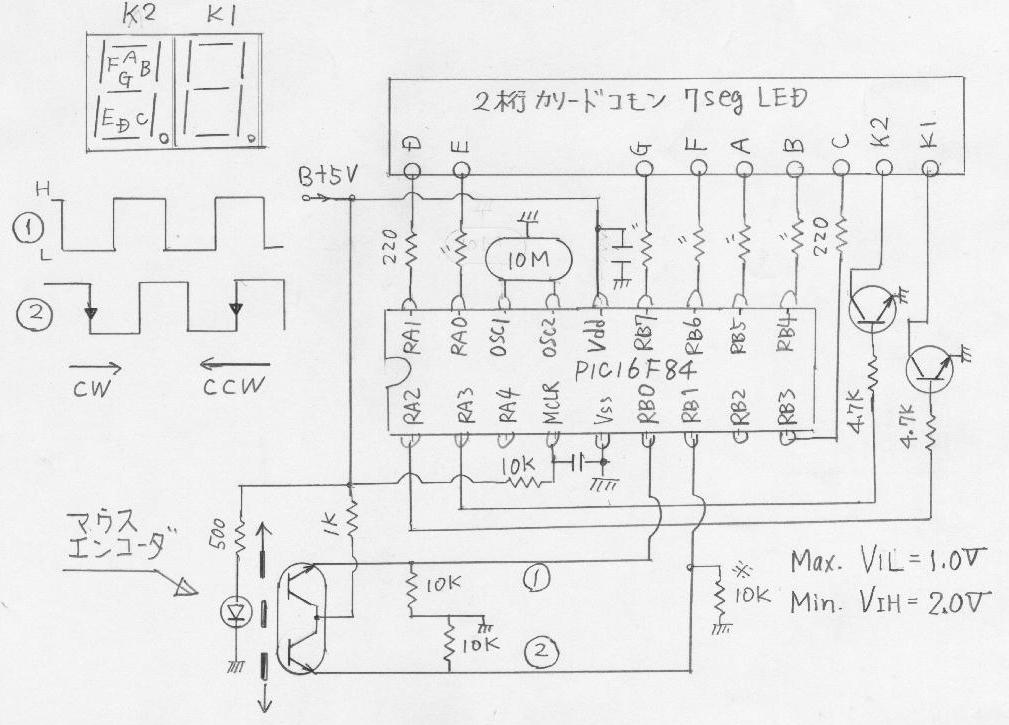
仠侽乣俋俋 LED昞帵婍
丒悢帤 侽乣俋俋傪昞帵偡傞憰抲偺夞楬恾傪壓偵帵偟傑偡丅PIC16F84 傪巊偄丄俀寘僇僜乕僪僐儌儞俈僙僌儊儞僩俴俤俢傪揰摂偝偣傑偡丅 偙傟偩偗偱偼丄扨側傞偍梀傃偱偡偑丄僾儘僌儔儉僜乕僗偼丄僄儞僐乕僟乕傪巊偆夞楬偺僒僽儖乕僠儞偲偟偰巊偊傑偡丅僒僽儖乕僠儞"checd" 偵傛偭偰丄LED昞帵拞傕 僄儞僐乕僟偺摦偒傪娔帇偟偰丄摦偒偑偁傟偽丄偡偖偵栠傞儘僕僢僋偲偟偰偄傑偡丅偄傢備傞僄儞僐乕僟偺嬻夞傝傪杊偓傑偡丅偙傟偼丄PLL幃僩儔儞僔乕僶偺惂屼僾儘僌儔儉僜乕僗傛傝丄僄儞僐乕僟張棟晹暘偩偗傪敳偒弌偟偰偒偨傕偺偱偡丅摦偔偲巚偄傑偡偑丄偙偺扨撈僾儘僌儔儉偺幚嵺偺摦嶌妋擣偼偟偰偄傑偣傫丅
仠僾儘僌儔儉僜乕僗
仦僟僂儞儘乕僪 Ecd.asm & Ecd.hex 帺屓夝搥.EXEasm僐乕僪偺傾僙儞僽儖偵偼丄廐寧偺AKI-PIC僾儘僌儔儅乕CD偵晅懏偟偰偄傞Pa.exe偑昁梫偱偡丅
丂
仠僄儞僐乕僟乕偺憹尭儘僕僢僋
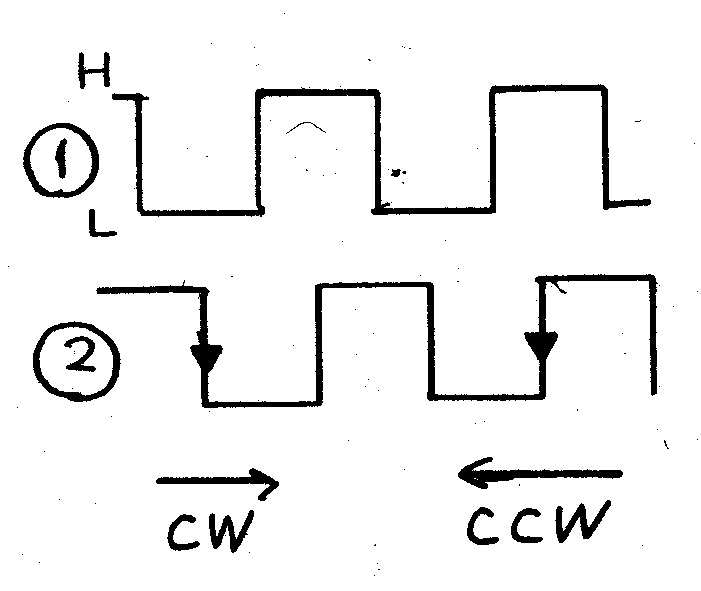
嵍偺攇宍偑僄儞僐乕僟乕偺弌椡偱偡丅嘆偺攇宍偼丄PIC16F84偺 RB0億乕僩傊丄嘇偺攇宍偼丄RB1億乕僩傊愙懕偟傑偡丅
嘇偺攇宍偑丄俫仺俴 偲側偭偨帪偵丄嘆偺攇宍偑俴偱偁傟偽尭嶼偟丄嘆偺攇宍偑俫偱偁傟偽壛嶼偟傑偡丅
乽崟偄墌斦偑塃帪寁夞傝乮CW乯偱偁傟偽丄嘆偺攇宍偼俴丅丅斀帪寁夞傝乮CCW乯偱偁傟偽丄嘆偺攇宍偼俫丅乿偱偁傞偙偲偑暘偐傞偲巚偄傑偡丅
仠挷惍
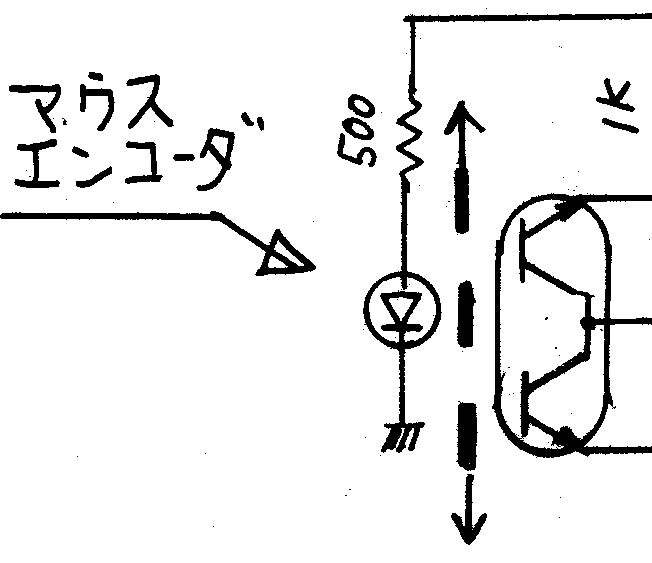
丒巗斕偺僄儞僐乕僟傪巊偆側傜偽丄偙偺挷惍偼晄梫偱偡丅僷僜僐儞儅僂僗偺岝妛僄儞僐乕僟傪巊偆応崌偼丄挷惍偑昁梫偱偡丅PIC16F84偵捈愙愙懕偟偰偄傞偺偱丄偦偺億乕僩偺嫬抣偺棟夝偑昁梫偱偡丅
丒夞楬恾塃壓偵 乽Max.VIL=1.0V,,Min.VIH=2.0V乿偲婰擖偟偰偄傑偡偑丄偙傟偑嫬抣偱億乕僩偺擖椡揹埑偑1.0V傛傝傕掅偗傟偽丄PIC偼丄俴儗儀儖偺怣崋偲敾抐偟傑偡丅斀懳偵2.0倁埲忋偱偁傟偽丄俫儗儀儖偺怣崋偲敾抐偟傑偡丅1.0V乣2.0V偼偁偄傑偄偱偡丅
丒僼僅僩俿俼偺弌椡怣崋傪僥僗僞乕偱應傝丄乽VIL=1.0V,VIH=2.0V乿傪傑偨偄偩怳暆偲側傞傛偆挷惍偟傑偡丅
丒幚尡偱偼丄10k兌偱愙抧偟偨帪偵0.6倁乣2.5V偵曄壔偟偰偄傑偟偨丅摉慠側偑傜愒奜慄俴俤俢偺揰摂揹棳乮IF乯傕塭嬁偟傑偡乮幚尡偱偼丄500兌側偺偱6mA)丅傑偨戩忋偺僗僞儞僪偺岝尮偑捈愙擖岝偡傞偲丄弌椡怣崋偼乽忢偵4.0V乿偲側傝傑偡丅Hi
丒0.6倁乣2.5V偺曄壔偱揹埑揑偵偼丄俷俲偩偭偨偺偱偡偑丄尭嶼偼惓忢側偺偵丄壛嶼偼晄埨掕偱偟偨丅傕偆堦偮10k兌傪RB1 偵愙懕偟偰丄惓忢偵側傝傑偟偨丅
 仦儂乕儉儁乕僕 僀儞僨僢僋僗傊栠傞
仦儂乕儉儁乕僕 僀儞僨僢僋僗傊栠傞
